Roboter Projekte
Wer braucht schon Ausgang und Alkohol, wenn man stattdessen einen Roboter bauen kann? Die Roboterprojekte, auf dieser Seite sind das Ergebnis vieler glücklicher Stunden im Bastelkeller.
Lehrreicher Nerd-Spass ganz ohne Kater und ohne rote Kontostände am nächsten Morgen.
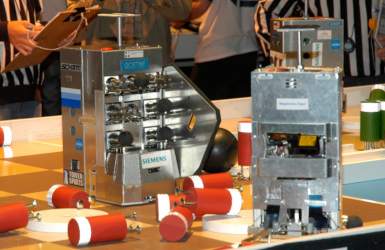
Eurobot 2005 Megatronic Sharks: Master und Bachelor
Master und Bachelor sind die Roboter, mit denen ich im vierköpfigen Team den Eurobot 2005 bestriten habe. In der Schweizermeisterschaft erreichten wir den zweiten Platz, in der Europameisterschaft den siebten. Der Bachelor verfügt über 8 Kanonen um Squashpälle auf die gegnerischen Ziele abzufeuern. Zudem hat er einen ausfahrbaren Schutzschild, um unsere eigenen Kegel vor dem Gegner abzuschirmen.
Der Master sucht und Wege und Brücken in die gegnerische Spielfeldhälfte mit Hilfe eines Laser-Distanzsensors. Diesen setzt er auch ein, um gegnerische Ziele aufzuspüren und sie zu rammen. Dabei kann er dank seinem Raupenantrieb auch über Hindernisse hinwegfahren.
Der Master sucht und Wege und Brücken in die gegnerische Spielfeldhälfte mit Hilfe eines Laser-Distanzsensors. Diesen setzt er auch ein, um gegnerische Ziele aufzuspüren und sie zu rammen. Dabei kann er dank seinem Raupenantrieb auch über Hindernisse hinwegfahren.

|
Bilder und Wettkampf
|
|
Technik Gallerie
Einblick in die Robotertechnik
|
|
Action Gallerie
Die Roboter in Action
|
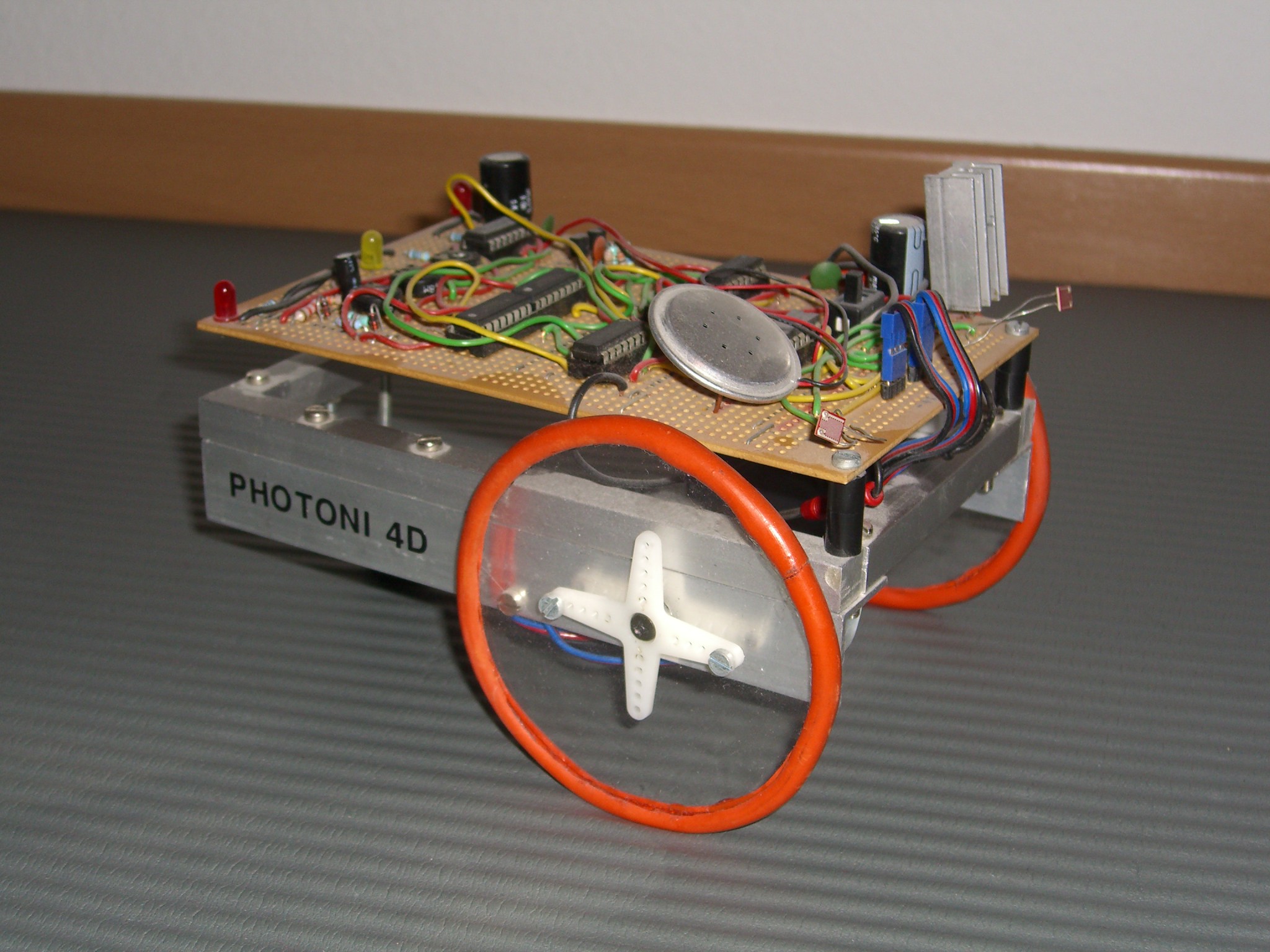
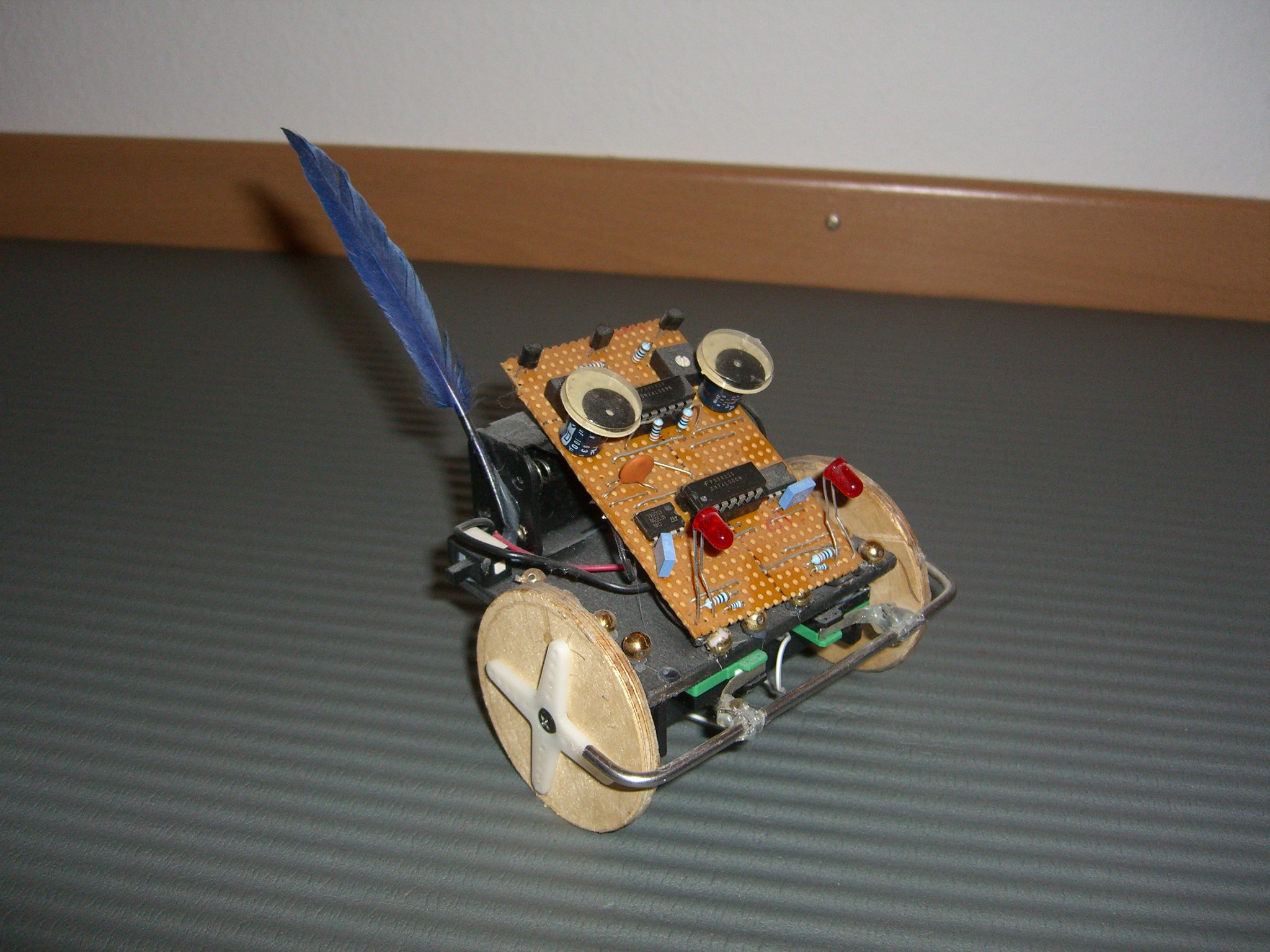
Photoni4D
Photoni 4d ist mein erster Roboter. Er reagiert auf Helligkeitsunterschiede und fährt immer die hellste Stelle im Raum an.
Seine Elektronik besteht aus TTL-Gattern und ist nicht programmierbar. Sein Verhalten lässt sich aber über drei Potentiometer
einstellen. Seine Sensoren sind zwei Lichtabhängige Widerstände. Mit diesen kann er sogar Hindernissen ausweichen, wenn sie
einen Schatten werfen.
Der Roboter wird von zwei Servos mit PWM Hack angetrieben.
Der Roboter wird von zwei Servos mit PWM Hack angetrieben.
Olimpia
Olympia ist meine erste programmierbare Roboterplattform. Gesteuert wird sie von einer C-Controll I.
Zwei schwenkbare Infrarot-Distanzsensoen dienen der Hinderniserkennung und der Orientierung im Raum.
Opympia kann auch nach Licht suchen und einer Linie folgen.
Der Antrieb besteht aus zwei Servos mit PWM Hack.
Der Antrieb besteht aus zwei Servos mit PWM Hack.

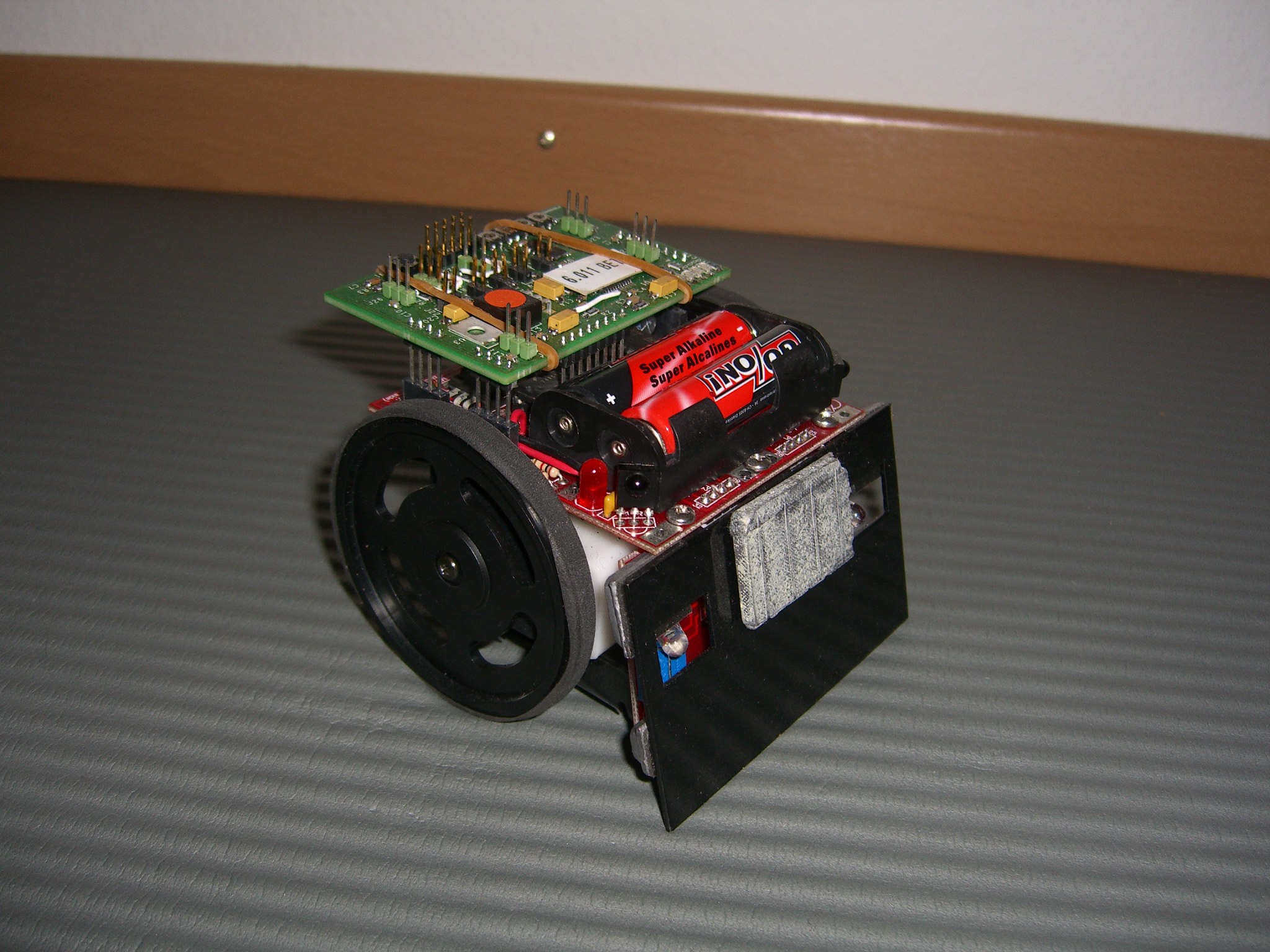
6011Beta
6.011 Beta ist ein Minisumo-Bausatz, für den ich ein eigenes Prozessorboard gebaut habe. Durch das Prozessorboard besteht die Möglichkeit, ihn mit zusätzlichen Sensoren auszustatten. Der Mikrocontroller ist ein MEGA16 von Atmel.
Mikro
Mikro ist ein kleiner Roboter, der dank einer Stossstange Hindernisse erkennen kann. Wird ein Hindernis berührt, fährt er in eine andere Richtung
weiter. Er kann feststellen, ob das Hindernis links oder rechts ist und zwischen zwei Ausweichmanövern wählen. Mit nur vier IC's ist der Elektronikaufwand
minimal gehalten.
Auch dieser Roboter wird von zwei Servos angetrieben, die zum DC Motor gehackt wurden.
Auch dieser Roboter wird von zwei Servos angetrieben, die zum DC Motor gehackt wurden.
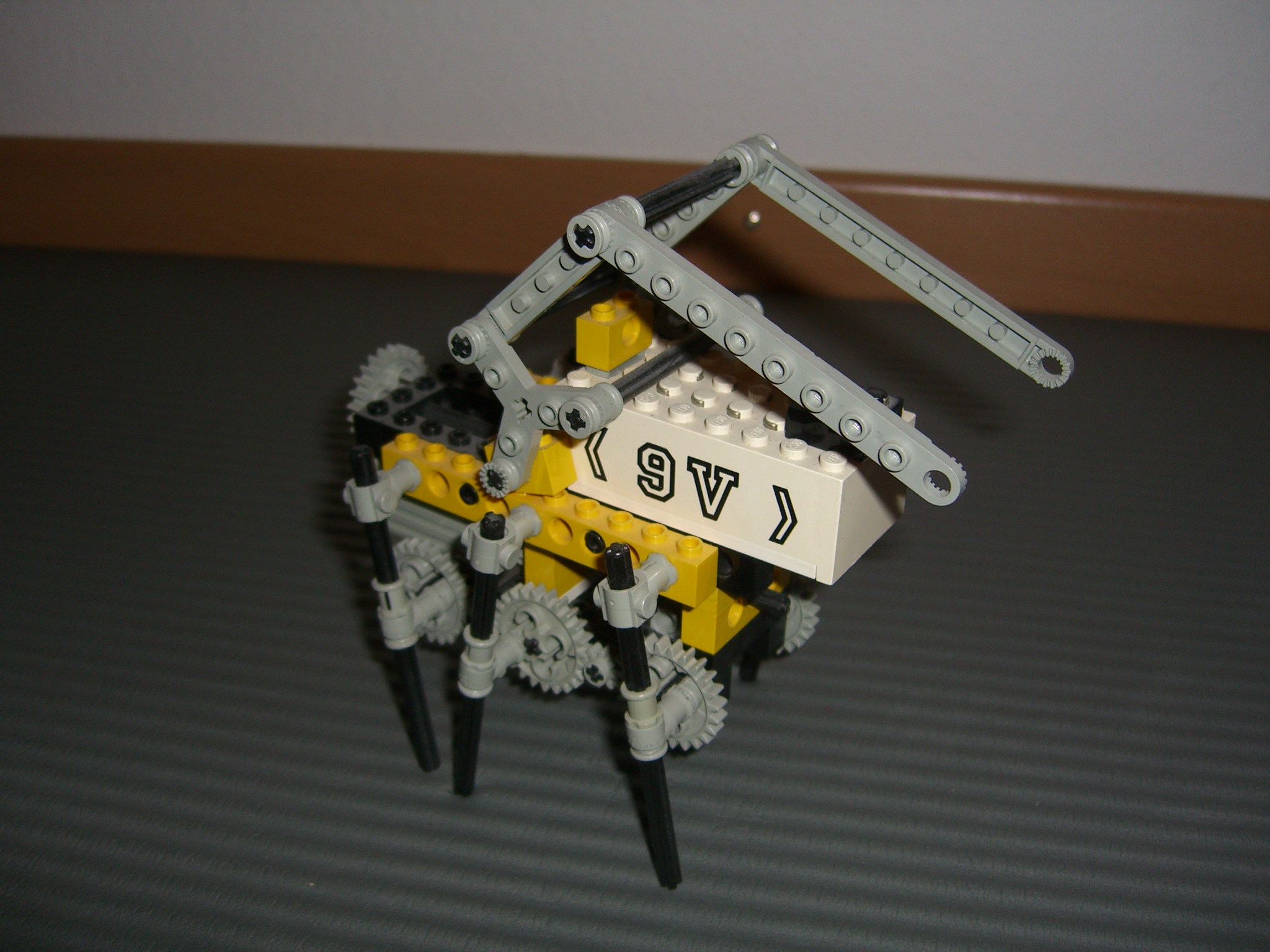
Bug
Bug entstand aus dem Wunsch, eine gehbare Platform zu bauen. Er kann auf seinen sechs Beinen geradeaus laufen und mit zwei Fühlern Hindernisse erkennen. Wenn er irgendwo anstösst, wird der Motorstromkreis unterbrochen und er bleibt stehen.
Das könnte dich auch langweilen:
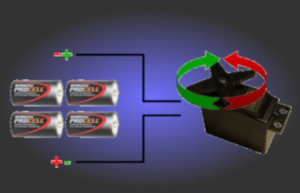
Servohacking
Servohacking Tutorial

Modellbauservos
Servo Funktionsweise
Eurobot hautnah
Erlebe mobile Roboter in Action
Unverzichtbare Grundlagen
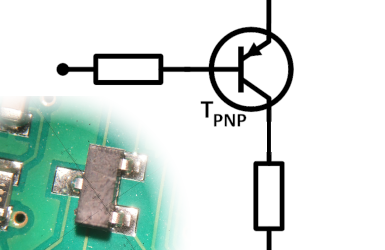
PNP Transistor als Schalter